Synchronizing Motor Position with Encoders, PID Control and Arduino The Bored Robot 8:14 9 months ago 62 539 Скачать Далее
Synchronising two dc motors using an Arduino and a simple PID position control algorithm. dprobotix 0:35 3 years ago 83 422 Скачать Далее
Position control of DC motor using rotary encoder ll PID | Arduino Kampos 0:34 2 years ago 10 708 Скачать Далее
[Full Breakdown] PID for DC Motor Position Control using Rotary Potentiometer GeeKee CeeBee 15:09 2 years ago 33 136 Скачать Далее
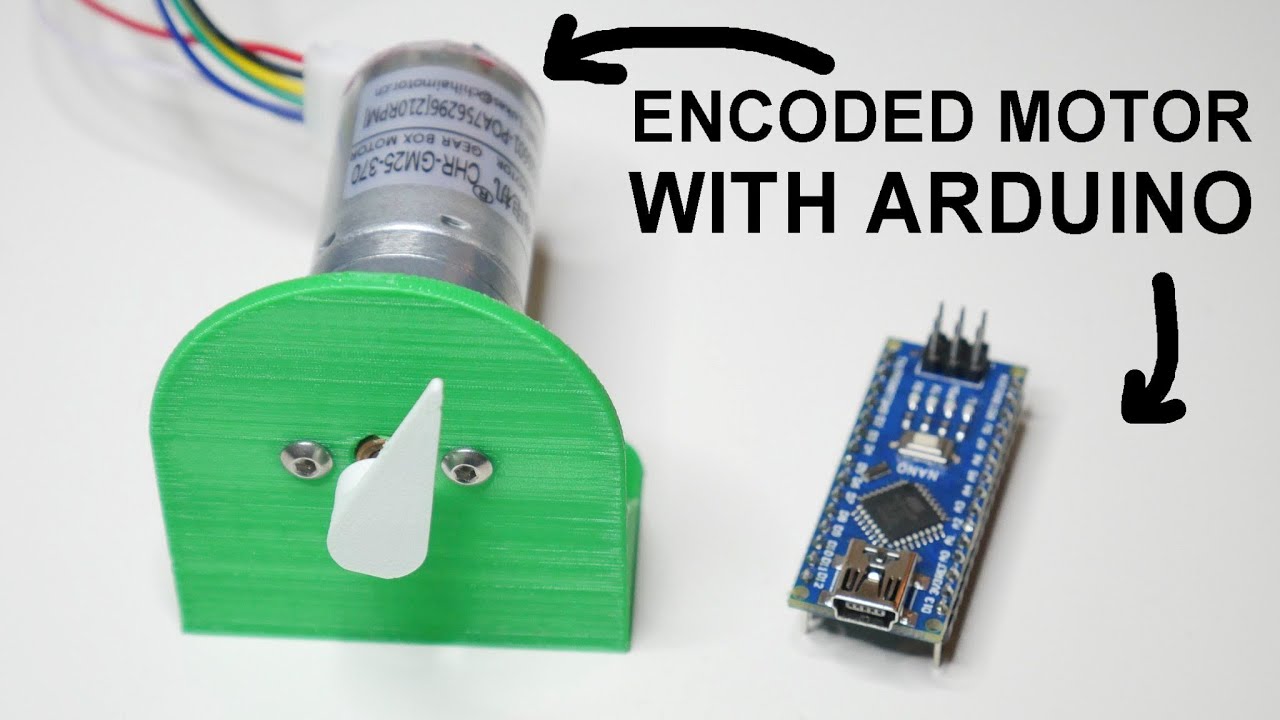
Connecting Rotary Incremental Encoder with arduino Mr Innovative 3:20 5 years ago 171 230 Скачать Далее
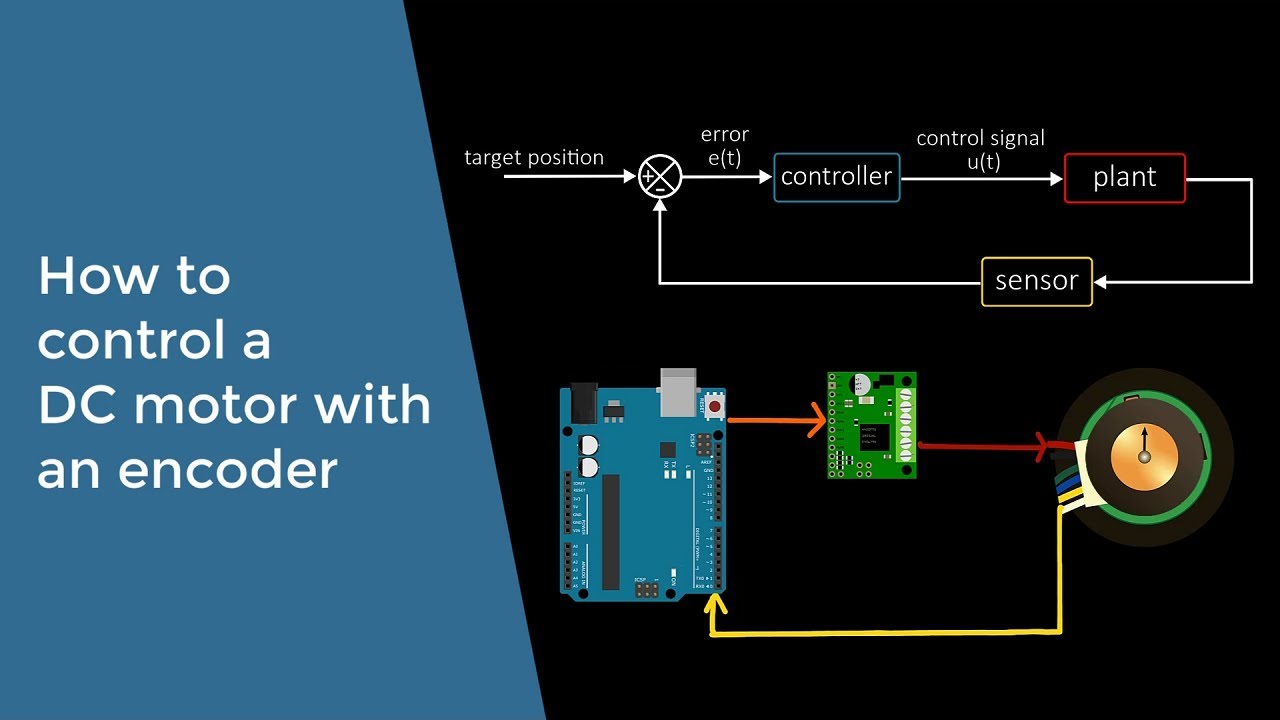
Arduino PID based DC motor position control system Mr Innovative 6:26 5 years ago 195 508 Скачать Далее
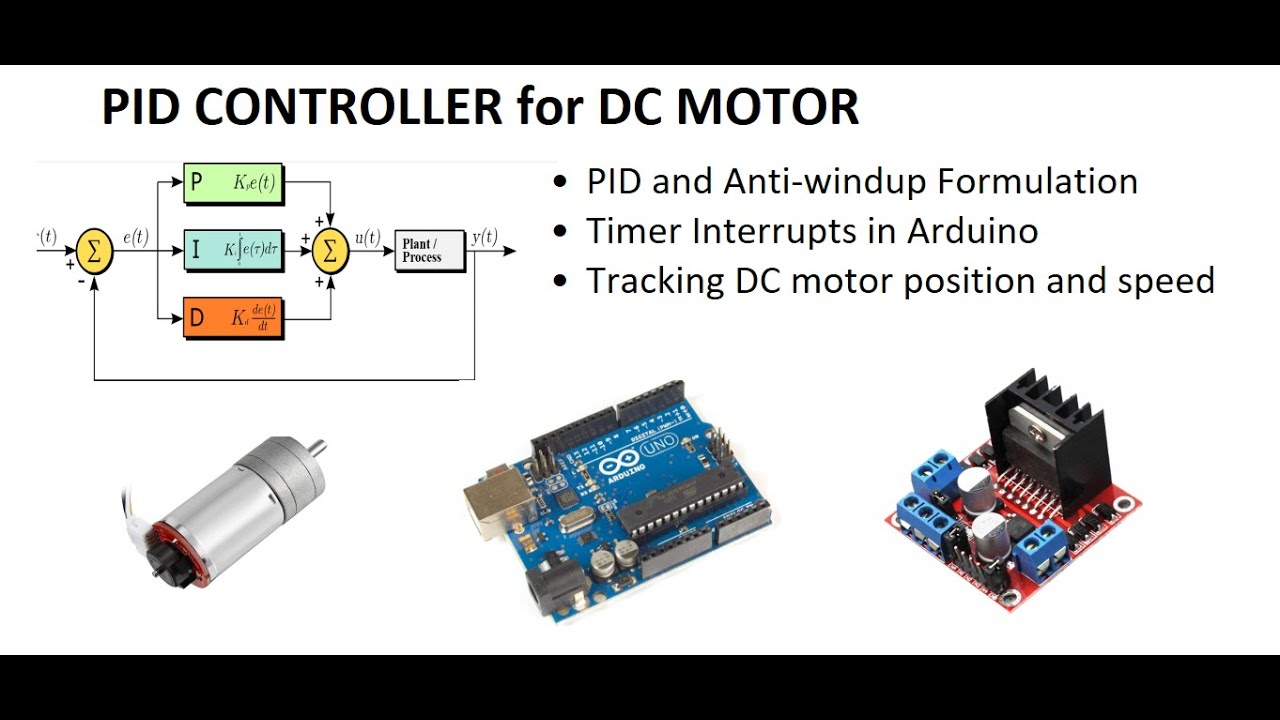
COMPREHENSIVE: PID CONTROLLER for DC MOTOR with Timer Interrupts and Anti-windup GeeKee CeeBee 34:45 4 years ago 88 971 Скачать Далее
Arduino PID Brushed DC Servo Motor Position Control Using Joystick TWO VOLT 1:11 4 years ago 4 973 Скачать Далее